Робо-зірка, черепахо-бот і техно-акула: вчені створюють роботів, які вміють плавати, для дослідження океанів

Першим прототипом став пристрій, натхнений морськими зірками.
Вчені з Массачусетського технологічного інституту (MIT) створили роботизовану морську зірку, використовуючи нову систему "швидкого розвитку".
Про це повідомляє наукове видання IEEE Robotics and Automation Letters.
Зважаючи на такі змінні, як течії, рівень солі у воді та плавучість, проектувати підводних роботів, як правило, набагато складніше, ніж їх наземних побратимів. Зрештою нерідко доводиться створювати безліч прототипів, додаючи все нові й нові функції. Цей процес не тільки дорогий, але й може тривати кілька тижнів або місяців, перш ніж вдасться отримати готовий продукт.
Коли команда під керівництвом професорів Массачусетського технологічного інституту Войцеха Матусіка та Даніели Рос вирішила створити робота-морську зірку з м'яким "тілом", що функціонує завдяки системі алгоритмів ШІ та машинного навчання, покликаного значно прискорити процес розробки. Ввівши необхідні дані в систему, вченим вдалося створити комп'ютерну модель, яка ілюструє, як такий робот може бути сконструйований і як він плаватиме.
Дослідникам вдалося в найкоротші терміни виготовити прототип у дії на основі отриманої моделі. Коли цей робот був протестований в резервуарі, наповненому водою, зібрані дані про його продуктивність були завантажені в систему з метою для подальшої оптимізації. Так, команда змогла створити функціональний продукт за лічені години, при цьому було створено всього кілька прототипів.
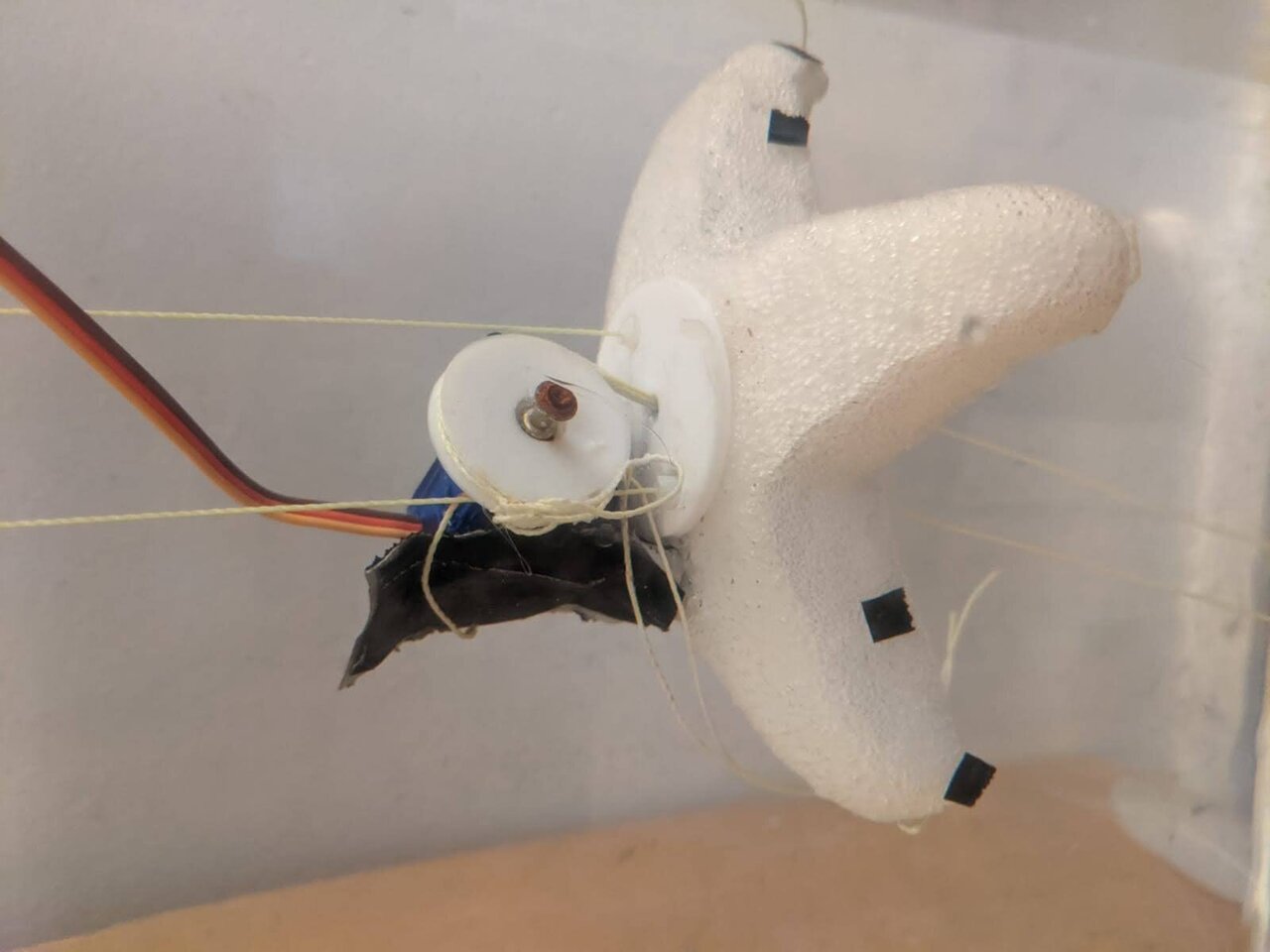
Остання версія робо-зірки має м'який силіконовий корпус, а також один малопотужний двигун, який з'єднаний із "сухожиллями" кожної з чотирьох ніг бота. По черзі стискаючи і відпускаючи ці ноги, робот може самостійно плавати. На думку дослідників, комп'ютерна модель врахувала важливі конструктивні особливості, які, ймовірно, були б втрачені людьми під час самостійної розробки.

{kind=link}
"За допомогою роботів-морських зірок ми дізналися, що, під час плавання крім рухів ніг, які помітні неозброєним оком, виробляються і деякі допоміжні рухи, які ми могли б втратити, якби не комп'ютерне моделювання", — говорить членкиня дослідницької групи, аспірантка Джозефін Гʼюз,
У кінцевому підсумку робот може харчуватися від бортової батареї і бути оснащений такими датчиками, як камери для збору океанографічних даних. І незабаром до нього можуть приєднатися роботизовані морські черепахи, скати й акули, розвиток яких планується за допомогою нової системи моделювання.
Раніше ми повідомляли про те, що вчені створили робота-ящірку, щоб краще дослідити Марс. Пристрій уміє повзати вертикальними поверхнями і буде застосовуватися в тих випадках, де колісні або гусеничні апарати неефективні.